科创知识的干货小课堂今天又跟大家见面了,本期的内容是大家非常热衷的机器人相关项目的话题。
在中学阶段,学生们做科学研究首先是要选择自身感兴趣的方向或课题,在确定开始做项目研究以后,一个系统科学的研究过程就显得尤为关键。
一般我们建议中学生的科学研究是先从问题出发,再寻求合适的解决方案。其实,还有另外一条科学研究的路径,那就是从技术的本身出发,追求技术上的极致,找到一个技术的基本方案,并在此基础上做出应用的延伸。
今天,机构的明星导师老师从2021年ISEF全球总决赛中非常优秀的作品——仿昆虫扑翼机器人的项目出发,来给大家解读飞行机器人的技术研究步骤。
第一步、找到灵感
有很多机器人,其实都是从现有自然界中的动植物中演变而来的,想要做一个飞行机器人相关的研究课题,自然也离不开从身边大自然中的飞行动物中去寻找灵感。
那么首先,我们要思考的是,自然界中的飞行动物都有哪些呢?
飞行动物我们在这里大致可分为两大类:一类是鸟类,另一类是昆虫类。鸟类的形态大小差异很大,可以小到麻雀、蜂鸟,也可以大到雕、老鹰。那么在飞行昆虫这一类,我们最经常见到的就是苍蝇、蚊子。
这里不禁就有个疑问:这些飞行动物,它们的飞行方式都是一样的吗?
我们会发现,大型鸟类的翅膀都非常大,所以它们扑动翅膀时的频率也会较低;而在小型的鸟类中,它们翅膀的扑动频率会略微高一些。若仔细观察这些鸟类,会发现有些翅膀是竖着扑动,还有些是水平扇动。以此我们也可以推断出,一般微小的昆虫,它们翅膀的扑动频率都很高。
那么,问题又来了,是不是所有的飞行昆虫都是这样的呢(翅膀扑动频率非常高)?
其实也并不如此,就比如蝴蝶,其实它的扑动频率是非常低的,但是它的翅膀很大(相比起其他的小型昆虫类而言)。
所以,科学的灵感和奥秘都蕴藏在大自然中的各个地方。有时乍一看,仿佛很多事物都具有共同点,但经过仔细地观察研究,就会发现很多平常不会注意到的细微不同之处。
第二步、定义技术
在国标机器人的分类中,能利用自身的飞行装置,飞行移动的移动式机器人,我们就把它叫做飞行式机器人。
飞行式机器人在我们的生活中已经很普遍了,比如最常见的就是飞机,我们都知道飞机最早的灵感就是来源于老鹰的飞行。除了我们熟悉的飞机和直升机,其实还有手抛式飞机、四旋翼、螺旋桨等。
这里简单介绍一下旋翼机器人,下图中我们可以看到一个最微小的旋翼机器人。它虽然非常小,但是它的功能很全面,比如在平衡控制、蓝牙和图像传输等功能上。
而越小的旋翼机器人在控制方面、材料原件的选择上要求是更高的,制作起来也更有难度。
今天我们所解读的入围了2021年ISEF全球总决赛的项目案例——仿昆虫扑翼机器人,它也是飞行机器人,但是其制作难度还要更高于旋翼机器人!
因为扑翼机器人它每时每刻翅膀煽动时所提供的升力,都是不一样的。下图左方我们能看到世界上最微小的一个扑翼机器人,它的重量非常之轻,甚至还可以在水底下进行游动。
第三步、设计方案
另外我们来看上图中的右方,它是一个昆虫仿生机器人,同样制作难度相当大,而且续航能力还比较低。
那么,作为入围了ISEF全球决赛的这个科创项目——仿昆虫扑翼机器人,它是将以上两个创造灵感相结合而发明创造出的仿昆虫扑翼机器人。
而这个科创项目,具备哪些优势呢?
第一是体积较小,不容易被察觉,所以它可以比较容易地融入到自然野生的环境之中。
第二是整个项目的造价比较低、相对便宜,那么我们很多零件都是可以去更换的。
那么在总结了这最主要的两大优势以后,接下来我们就需要进行真正的设计过程了。
设计的过程和思路
确定好了这一个课题,比如我们选择了这个仿昆虫扑翼机器人的项目,前期在确定了它的优势之后,接下来就要去思考怎么设计它。
通过观察研究发现,这个项目最重要的大概率还是重心的平衡问题,包括上文中我们所讨论过的翅膀扇动的频率(频率的高和低),还包括了转向的问题。

科创项目——仿昆虫扑翼机器人
设计流程的细化 & 优化
在确定好了大致的设计思路以后,下一步则需要开始细化整个设计流程。比如说,需用什么样的电机去驱动,这个电机转速如何,用什么材质去搭建一个机器人的机身,用什么结构去减速等等。
整个的设计流程,会在后期不断的设计、制造、优化的过程中,逐渐创造出一个初步的扑翼机器人原型。
第四步
实验测试
飞行机器人和其他机器人,有个最大的一个区别点就是在实验。
为什么?
因为扑翼机器人对实验的要求很高:场地的选择、保护措施等。由于飞行机器人的实验是在空中进行的,而且初代设计的时候,它的性能是不太稳定的。
实验一旦开始,机器人离开我们的双手飞到空中后,它的飞机情况便不可预测了:可能会掉到地上摔碎,又或者飞到某个我们无法触及到的地方去了。
所以说,场地选择非常关键,我们需要保护好我们的机器人,确保它在飞行过程中尽量不出现意外的状况,在此基础上又不能影响它正常的飞行状态。
但是想要扑翼机器人的实验能够成功,其中有3个特别关键的重点&难点需要关注,并需要在实验进行时去尽量满足:
飞行机器人要起飞,那么它的升力必须要大于重力(这样才能确保飞得起来)
需要控制它的重量不能太重,或者翅膀旋翼需要大
震动(或扑动)的频率要高
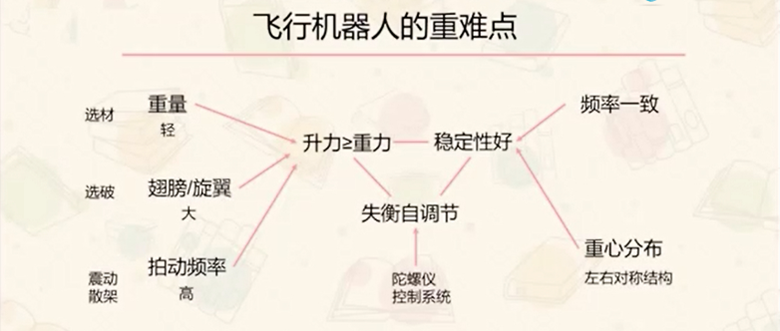
图片来源于机构
其实,要满足仅仅以上这三个要求,在实际情况中就已经非常困难了。
比如说在选材方面,如果重量要轻,那么对材料的要求就要高。如果翅膀大的话,那它飞行过程又很容易破损。如果要它的震动频率高,那么高频的震动又会引起散架等问题。
倘若能在稳定性的问题上解决得比较好的话,最后还得考虑其可能出现的意外情况:当意外情况发生时,它是否能进行自我调节。
比如,飞行机器人在飞行过程中,很容易会因为一阵急风,或者其他的突发干扰而出现失衡现象,很可能就会从空中坠落。那么,我们就需要预想到这些可能会发生的意外情况,让它能通过自我调节在最短时间内恢复自身平衡,重新飞起来。
在有关自身平衡方面的问题,最简单的就是可以在成熟飞行器的基础上改装或加装一些设备,就比如加装摄像头,让飞行器有监视或是捕捉画面的功能。
再或者,我们可以加装一个机械手,或者再提高一些难度,去设计转向或更新型的转向方式。比如改变飞行装置或是在飞行器开始降落时(由于它翅膀会极易折断),设计一个折叠飞行翅膀,这样能确保它在即将降落地面之际,迅速收缩翅膀以防止飞行器毁坏。
那么经过了实际的实验过程,扑翼机器人的设计雏形就基本成型了。接下来一步就要考虑它的稳定性了,是不是每次实验都能保证其飞行状态的稳定。
要知道旋翼的稳定性要比扑翼的稳定性高不少,但是扑翼它每时每刻所提供的升力都不一样。如果希望确保它有较为平衡的稳定性的话,那必然需要通过不断的调试,去适配它的重心以及它的扑动频率。
第五步、应用延伸

图片来源于机构
从优秀的项目中去挖掘新的科创灵感
仿生飞行机器人的设计难度已经是非常高了,需要同学在设计项目之前就要熟知这些飞行动物的生理结构、飞行形态以及飞行中滑行与悬停的原理等等。
在上图中,机构为同学们拓展了一些可以尝试的科创项目集合,其难易程度自上而下,越在下面的项目难度越大。
而通过本次深度解析可以发现,一个有竞争力的科创项目,从一开始设计到最终落地,难度只会是越来越大的。在学生实际的科创过程中,可能还会碰到大小各异的种种预料之外需要解决的问题和困难。
课堂结语
科学研究的过程——学生科创素养的积淀
解读一个好的科创项目能够激发出更多新的科技灵感,但灵感还需要历经反复的科学实践才能有落地生根的可能。
在科学研究中,尤其是理工科类的科创过程中,不仅是不同专业领域知识的交叉运用和输出,同时它也是学生科创素养逐步积淀的一个过程,而想要真正完成一个有价值且优秀的科创项目并非易事。

图片来源于机构
通过科学创造 激发学生的科创潜能
学习科学研究,让学生不仅学习的是想法和灵感,还要学会积极去运用所学到的科学知识,懂得基本的科学研究过程和方法。能在实验过程中发现问题、解决问题并能做出论证,潜移默化地激发出中学生在创造上的潜能,最后通过努力实践成功地创造出专属于自己的、并且非常优秀的科研项目。
一个完整的科研过程背后,除了基础的专业知识累积,更是无数优秀的科研学者在每一次成功或失败的实验实践的总结与反思。科学研究同样需要开拓视野,我们青少年科创群体更需要一个好的启蒙者和带领者,在他们科创梦想的道路上培植和相伴。
【竞赛报名/项目咨询+微信:mollywei007】